This will be a whole other post, but I’ve gone through great lengths this year to discourage wildlife from eating our stuff. Of course the clueless fawn to gorges itself in the middle of the day with zero appreciation for the effort.
This will be a whole other post, but I’ve gone through great lengths this year to discourage wildlife from eating our stuff. Of course the clueless fawn to gorges itself in the middle of the day with zero appreciation for the effort.
This is shaping up to be a great berry year. We’re often amused that in our work toward greater self sufficiency, we never produced enough of a staple (potatoes, corn) for our family’s consumption in a year. But we’ll wolf down hundreds of dollars of berries in one day. We seem to have succeeded at overproduction only with luxury foods like blueberries, raspberries and maple syrup. It’s nice really but one wonders about priorities.
This season is notable in that we have a great read of what the plants are doing, and have managed to stay on top of them. We’ve been good a picking a little every day, a little before ripe, at good times of the day. The chaos of previous years along with our lesser experience then didn’t allow for the slow and steady approach coupled with good calls. One of the improvements is that we are no longer trying to process the quantities before they rot. Now we simply freeze it all until Fall when a day long fire can be used for 1 big canning session. Making preserves in the Summer in small batches was far from ideal.
We’ve been getting 1 big bowl per day for the past couple of weeks, that’s what’s left for the freezer after we all splurged.

When picking raspberries, it helps to be low to the ground. The best picking is when we crawl through the bushes.

The blueberries are on a whole other level.

It was getting pestered by a couple of other birds flying too fast for identification, which only seemed to mildly bother it.
I built it last year and took a bunch of pictures to document the build. Then life happened and I didn’t. Someone noticed I had an undocumented v2 and asked about it, so it was time to fix this.
In the Spring and Summer we often hear the sound of one or several corkscrews coming from pine logs. It’s weird in a funny way, and any time we’ve tried to investigate we didn’t find the culprit. Whatever is doing this stops when you move the log.
We finally got to the bottom of it, and found the bug responsible. Its mandibles must be quite strong to make such a ruckus. I’m not sure what they’re digging for, food and protection I assume. I had ran into them cutting wood before, they get bigger. You can see the byproduct of all the digging it’s done.

Yuck

I think it’s a Raghium Inquisitor, or ribbed pine borer. Makes sense.
Robin found some copper flashing at the hardware store. Hell yeah I’ll etch it.
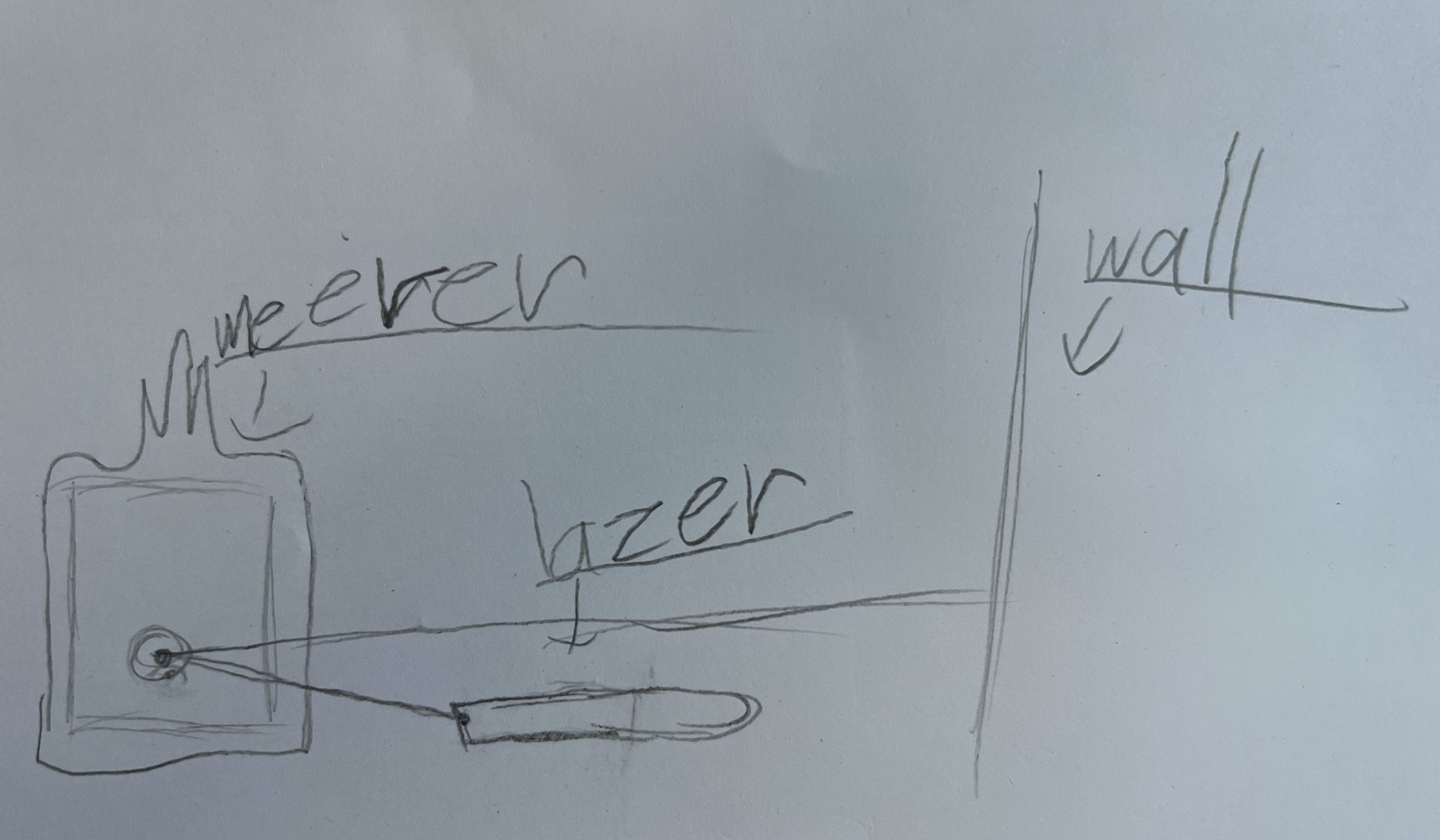
The glint is good, but it comes with a traveling vertical line that reflects the light source. I need to see if I can treat the surface to avoid that before etching. By happenstance I found that a rectilinear light source (office neon) perpendicular to the etching works better than a single light source pointed at it. It covers more vertical angles of viewing while not diffusing the horizontal effect. Running it parallel, much like a diffuse light source, ruins everything. I should draw how this stuff works a bit.
It took us years to establish this patch of Lilies of the Valley.

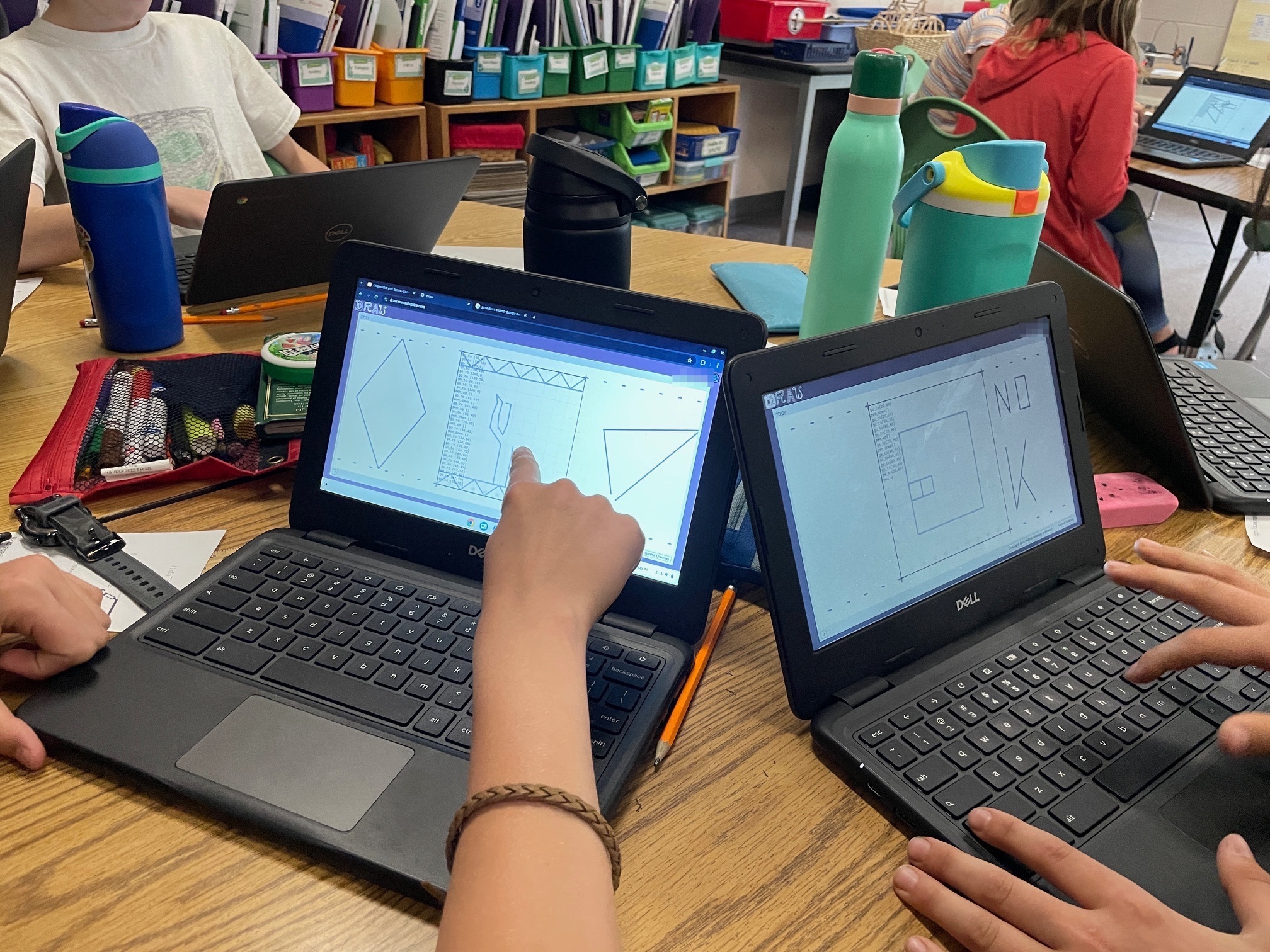
I just did my yearly X,Y Coordinates stint with local 5th graders. It’s the 5th time I do it and this year is notable in that I didn’t write anything I wanted to fix for next year. Every time previous I came out thinking I needed to fix a bug, prevent a confusion, or improve something or other. This time it looks like the formula has been refined to its optimum.

Kids will definitely push the limits, and I love that relentless will to push, it’s identical in nature to IT security curiosity. 1 kid wrote some code and then copy/pasted it a bunch of time, no problem there’s an upper limit on instructions. Another tried to hog all the squares by having them draw just a single dot, no problem there’s a cool-off timer that prevents you from blasting through squares. I haven’t had to use it but I also have a censorship mechanism :), I can scribble over any square and the machines will prioritize it.
So this year went really well, I think I can say with confidence now that the magic operates every time, this isn’t just luck with a good batch of kids or other. Every time we launch into “coding”, there’s a moment of sheer teeth grinding where I think it’s going to be a disaster. And every time they are all extremely motivated by the idea of controlling the machines when they hit “submit”, and so they all pull through and help each other out. Once one of them has gotten the machines moving, there’s a real frenzy to figure things out, and then their next drawings get more and more sophisticated. 5th grade might have a few blasé pre-teens who are hard to motivate, and they will inevitably get sucked in. Now they might “whatever” out of the activity after a bit, but even they will want to have done it at least a couple of times :). I particularly like when kids realize they can coordinate action on neighboring squares to do something greater, I purposefully don’t suggest that to them. I’ve gotten good at fending off “learned-helplessness”, not that I was doing it for them before, I’m just quicker to disengage. “You want to control the laser kid? Well you better figure it out”.
The “coding” interface

One of the snag we always hit is kids not able to discern the difference between typing in a URL or doing a search with Google. And a giant middle finger please for all the corpos purposefully blurring lines so kids form the habit early of running anything they might want to do on a computer through Big Corp Inc.
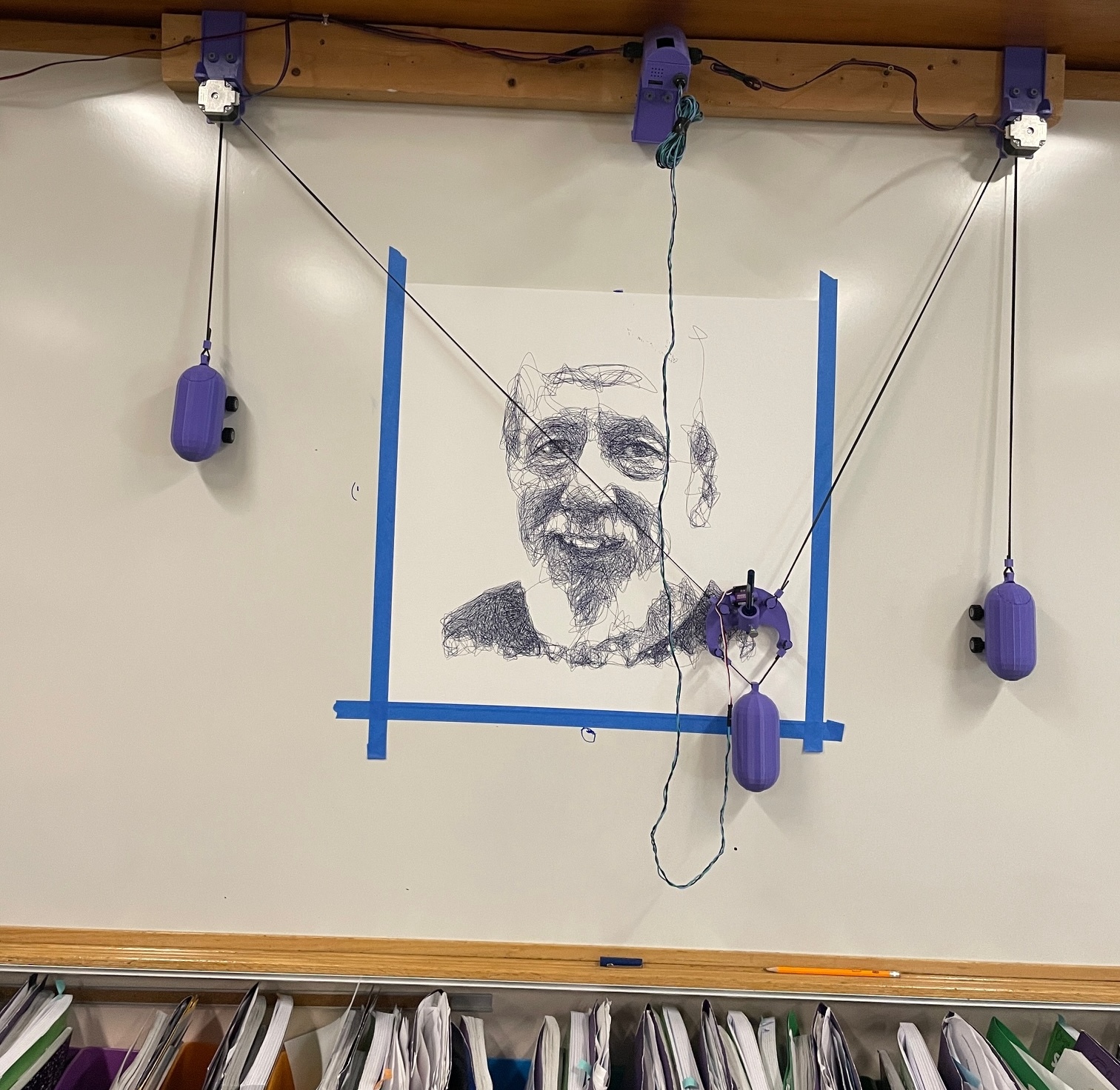
At the end of the day I send the wall plotter on an overnight portrait of a well liked central figure in the school. The next morning when I pick up the machine, the kids get one last wow effect. I’ll make a note of how many “go_to” statements went into the picture, usually several hundred thousands to get them thinking about scale and how curves can really be just a few tiny straight lines. They submit an average of 30 such statements for their cool drawings.
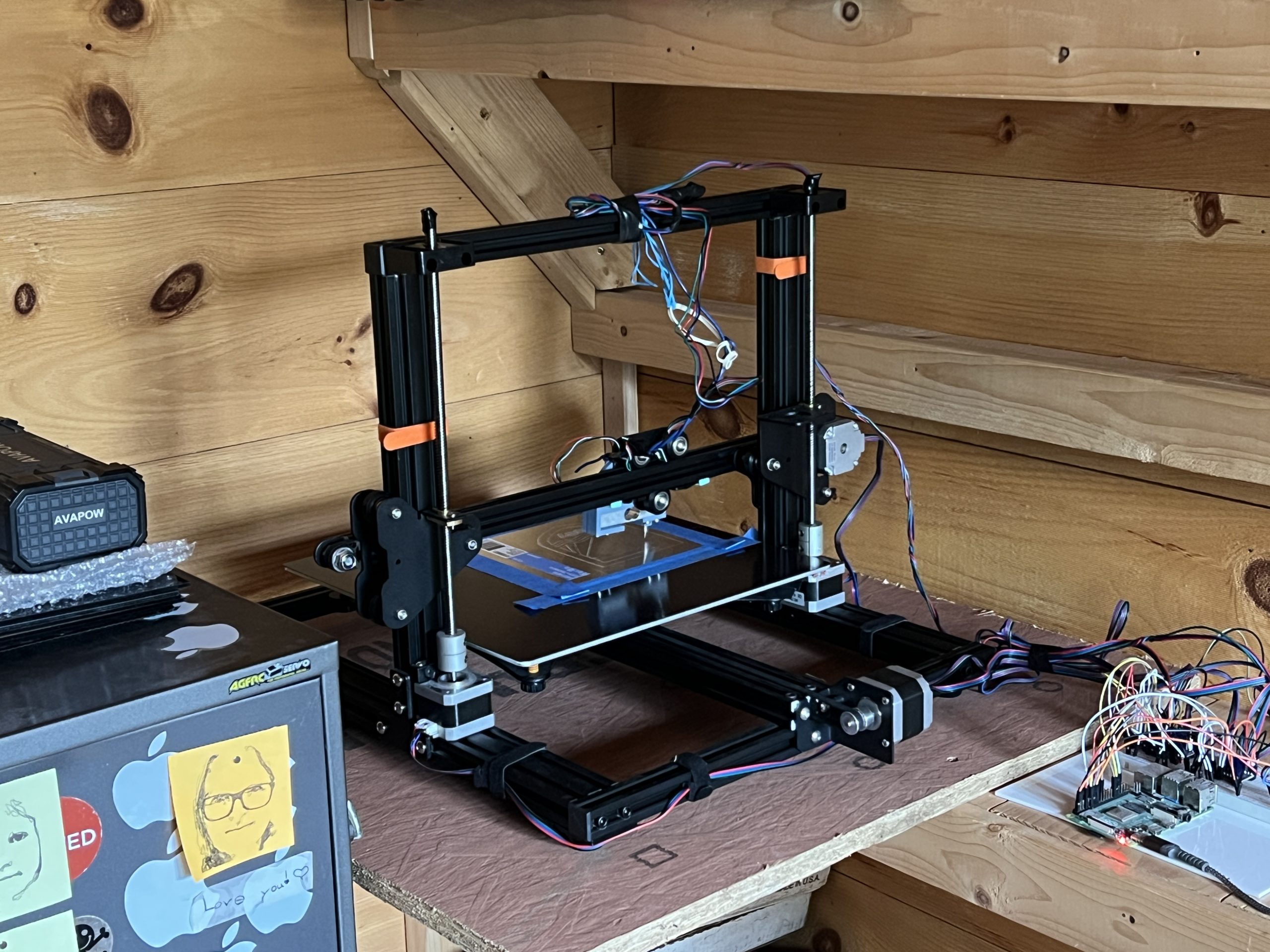
My office is a little small and barely able to contain all the machines I’ve accumulated. The 3D printer I turned into an etcher for specular holograms was obnoxiously tall, and really doesn’t need much vertical range. I chopped the aluminum extrusions so it would fit in an unused corner of the room. I’ve been doing occasional tests here and there, nothing worth showing yet. Results are very hit and miss, and finding good subjects is hard too.
I started going through the massive amount of oak that was dropped in my driveway last Winter. It’s fun and fast.

Everything is massive with this oak. I excised some of the cool knots, not sure if I’ll ever do something with them but I figure they might be cool in some project. They need to dry a few years first so now’s not the time to think of what that could be.


Beyond the knots, we thought it’d be kind of a shame not to get a few boards out of such a special tree. It’s oak, it really stood out as a tree, it’s close to 200 years old, and we walked past it for 10 of them. So after researching possibilities, I bought a chainsaw mill with a 24″ bar and a ripping chain. The saw is a monster when fully equipped.

I haven’t taken it on its maiden ripping yet, all in due time. And now I’m dreaming of going deeper in the woods and building a cabin with lumber milled on the spot.
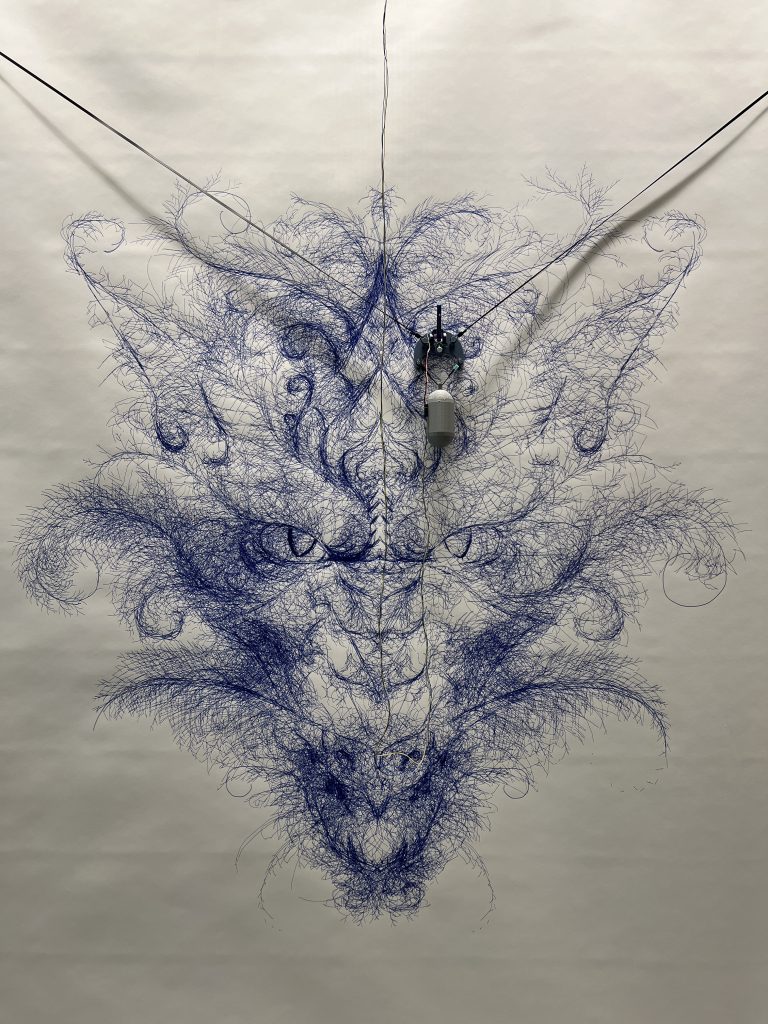
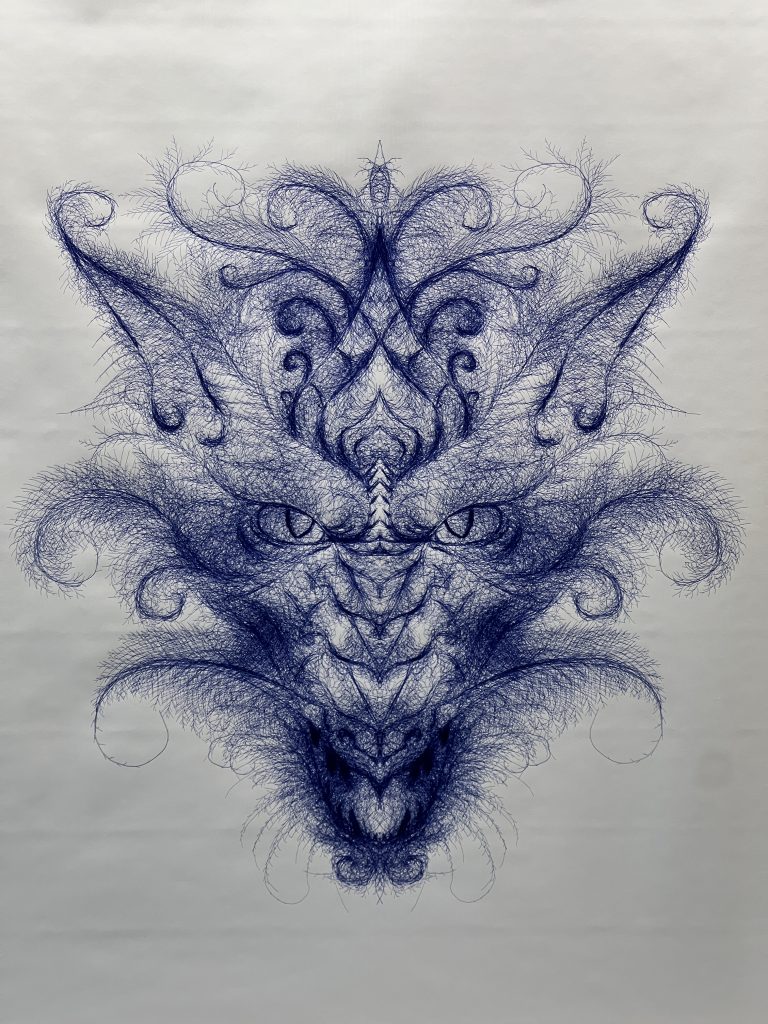
7 days, 47438 pen strokes :\. Lara’s work and a recurring dragon on this blog :). I sped up the machine to make it 7 days instead of 10, so it’s slightly more inaccurate, but more importantly I failed to anticipate that ink would run out faster. I used to have about 1.5 days between pen swaps, here it’s barely above 1 day. No harm done I got there in time, but I should have thought about it when I adjusted speed.
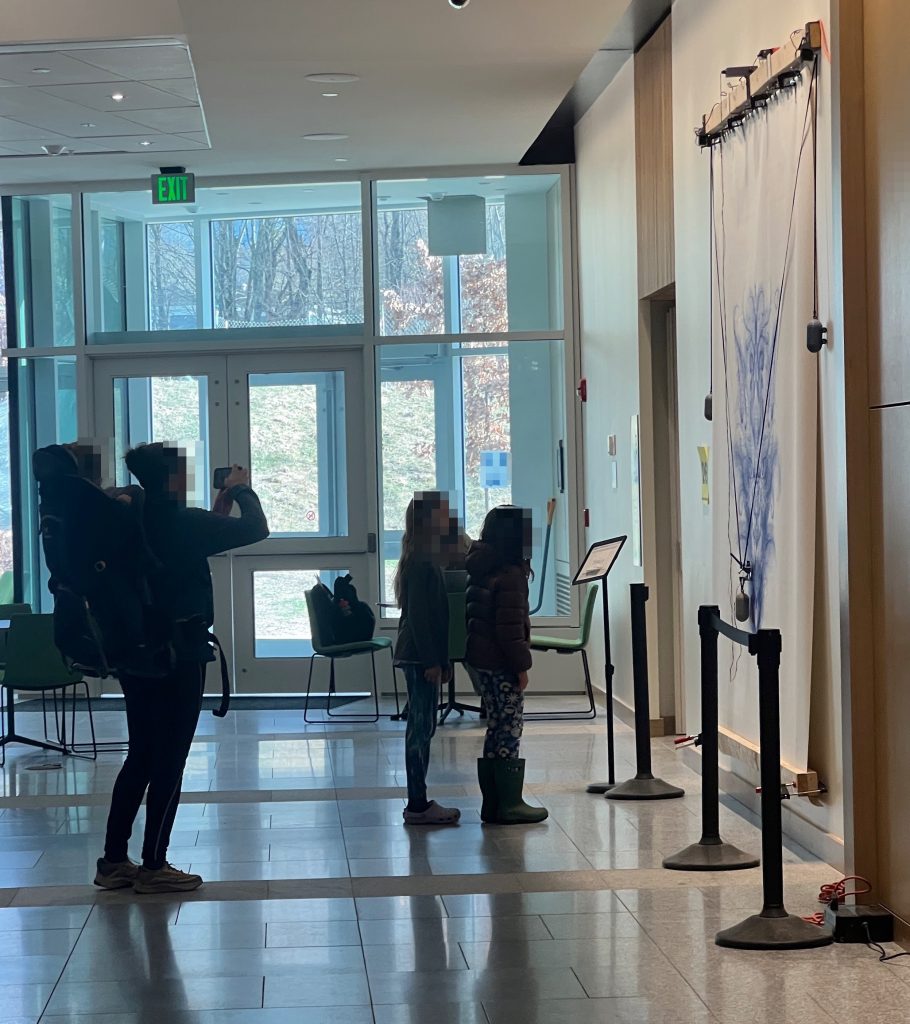
I lined it up with a big public event and tons of people got to see it.



No sure if there’s anything more to say about lasers & post-it portraits, it was the now usual formula. I’ve enhanced the pipeline some to do auto-face-cropping as it is a step we usually waste lots of time on. Esther & I rehearsed over the week end. She runs the operation during the event.

Some recurring questions I get asked at these events:
“What are the machines for normally?” Nothing, their sole purpose is to drag pens and shine cat lasers.
“Is this your job?” Nope, just a side quest.
“So how does this work?” I try to see what part they’re interested in before I launch into a 3 hour tirade :).
“Did you build this?” yes.
It’s very gratifying to see people stare at your work for a while. You can see the gears turning in their heads. I’ll sit by the big machine sometimes to watch people’s reaction to it. When I swap its pen people will come up and tell me how much they like it. I’m just glad for having the opportunity to do something cool in the world.
I spent the whole week end in the sugar house, maple trees have been relentless this past week. We have ~5 gallons of syrup canned so far with at least 3 more coming. The smells are incredible in the Spring, Winter makes you forget that the world has any smell at all. Wet soil hits the hardest after a long Winter, and it’s quickly followed by pine smoke and sweet sap.

I was invited back to the science museum to do something cool with my machines. Any time I do a public event it’s an opportunity to figure out what’s engaging and do better the next time around.

I was maybe a little too motivated and brought several machines, almost my whole apparatus, and deployed them in various modes. 1 PewtyBot, 1 Mirror PewtyBot, 1 PlottyBot & 1 SkecthyBot doing portraits, and 1 PewtyBot people could control with their phones. The laser portraits worked wonders again, but the original PlottyBot drawing post-it portraits worked even better.
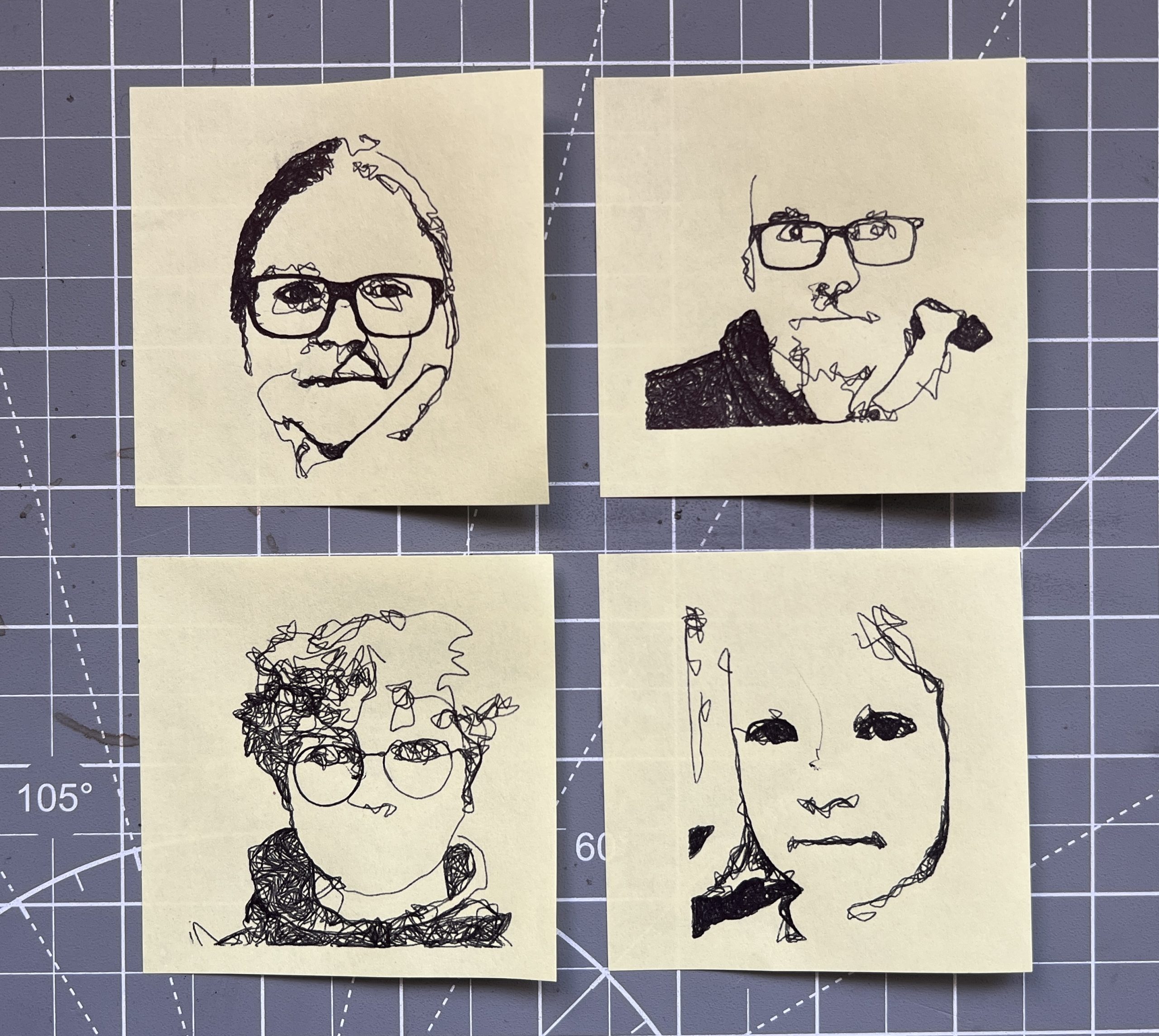
People were clearly keen on getting a tangible souvenir from the evening. Having a robot draw their portraits on a Post-it note struck a chord hard. I think what I’ve learned from this event is that while the lasers throw a lot of pazzazz at you, they are more complex machines that most people don’t try to engage with beyond taking in the light show. While a pen based machine is doing the same thing you’d do with your hand so it’s more approachable to be curious about. As usual a small fraction of them were fixated beyond reason on watching the machine at work. There has to be a “drawing automaton obsession” gene present in ~10% of the population.
Unfortunately, I only had one PlottyBot doing the Post-it portraits, and they take much longer than the lasers so I spent much of the evening trying to keep track of a queue of people who wanted one.
I built 2 4’x4′ photoluminescent paper holders so I could deploy this easier. In the past, finding a decent spot on a wall for the rolls and unrolling them was difficult and time consuming. I also have plans for doing random outside events at dusk in random places this Summer, which is why having something deployable was worth the construction effort. I tried it some already at home last Summer and it’s kind of cool to have the lasers go on a warm Summer night.
I had several people ask me if this was AI :), this seems to have become the go-to explanation for anything tech based that can’t be explained easily. Much like Clarke’s law that “Any sufficiently advanced technology is indistinguishable from magic”, only now it’s AI instead of magic. I’d respond that it was just good old organic grain-raised free-range “I”.
As usual, it was very hard to capture the coolness while manning it so I don’t have much visuals to represent what went on. Ultimately it’s just me running 5 machines, a software stack and talking a lot. Suffice it to say people were into it and I’m emboldened to keep trying public events. Fun times!
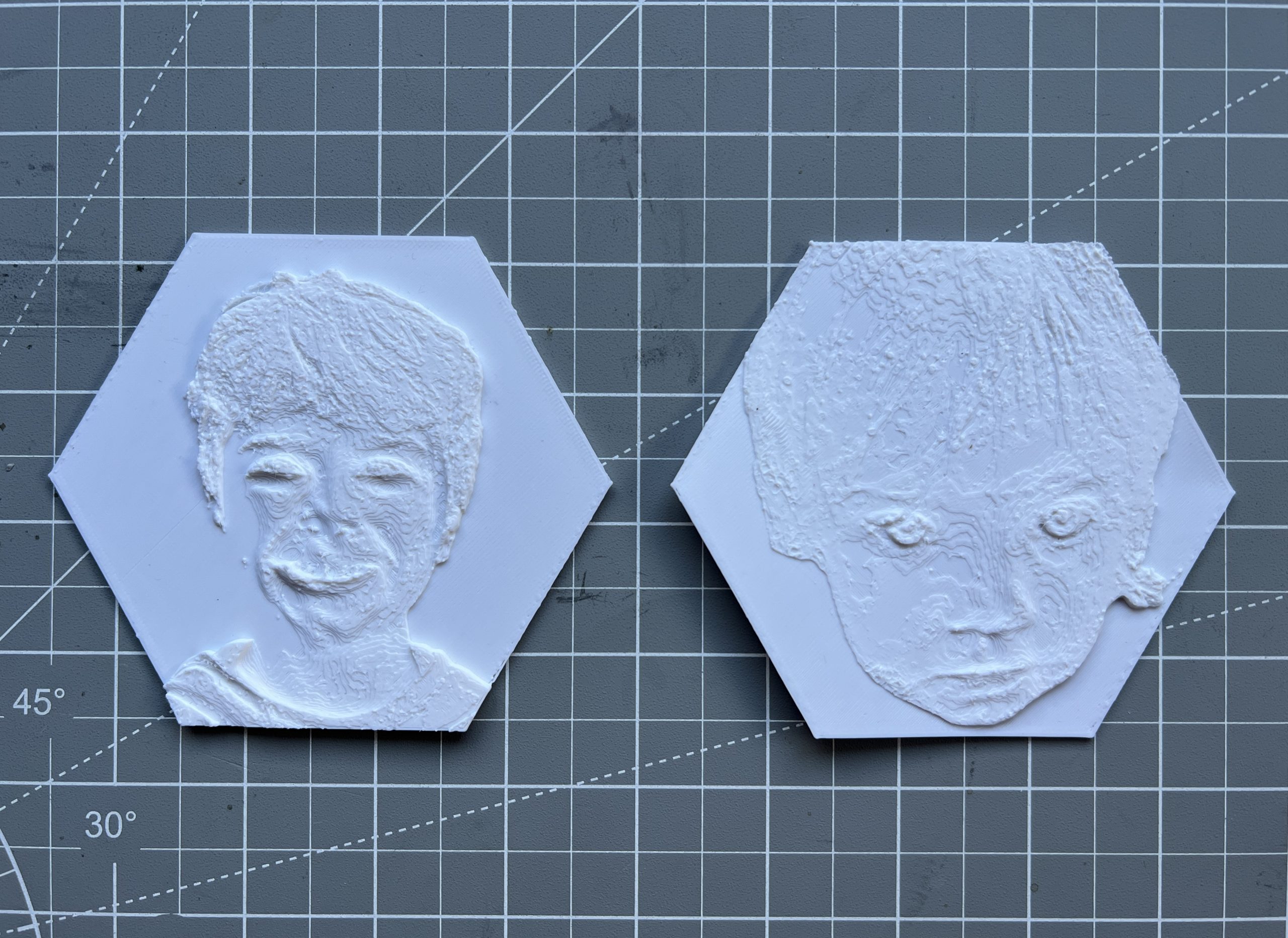
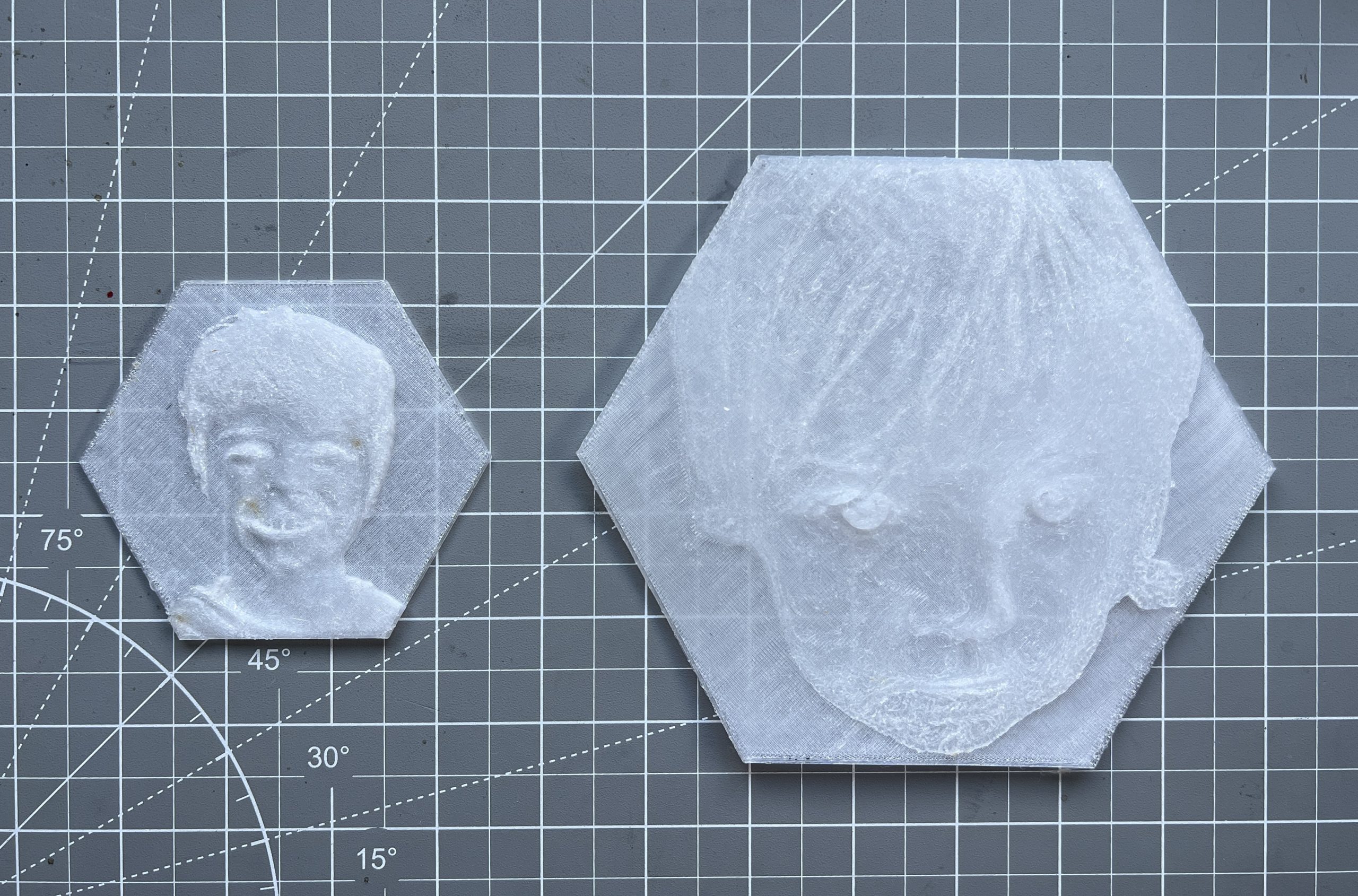
Pretty simple yet cool stuff, I’ve tried both transparent & white filament. And a very well done website helps make the STLs.
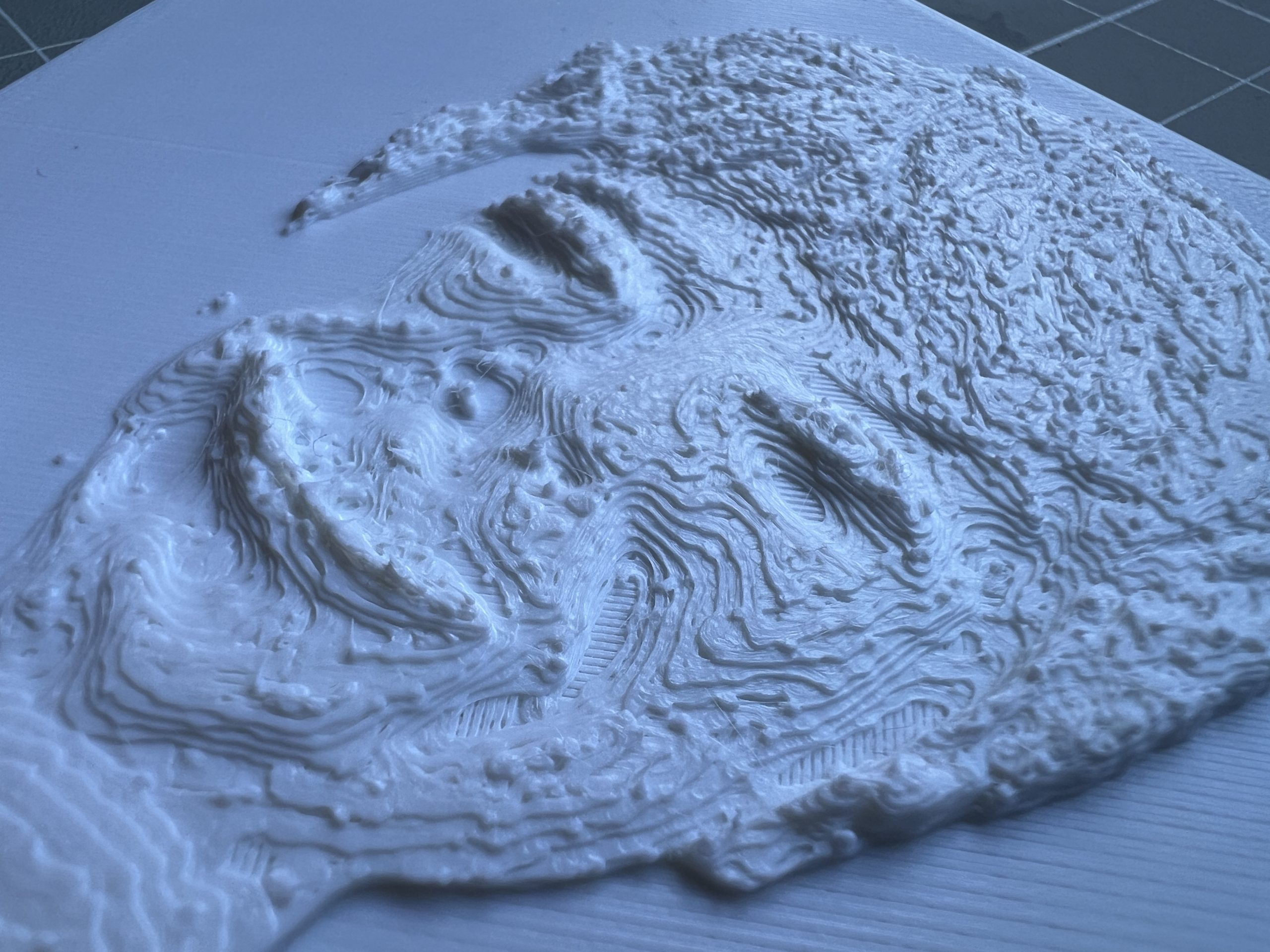

The mirror based PewtyBot proved conclusive enough but since the laser is reflected twice, a degradation is clear on the medium if the mirrors aren’t high quality. Clearly the cheap plastic ones I got to test with aren’t, but they served their purpose. With much research on mirror specs & bounding agents, I went ahead and spent $70 on two tiny “surface first enhanced aluminum” mirrors. Once again, I forgot everything about my high school physics lessons, but some vague notions are left to help me navigate through specs. And this being 2026, of course there’s a website dedicated to optics of all sorts I can buy any sort of mirror from. The modern world has its flaws, but access to information and stuff is definitely covered.
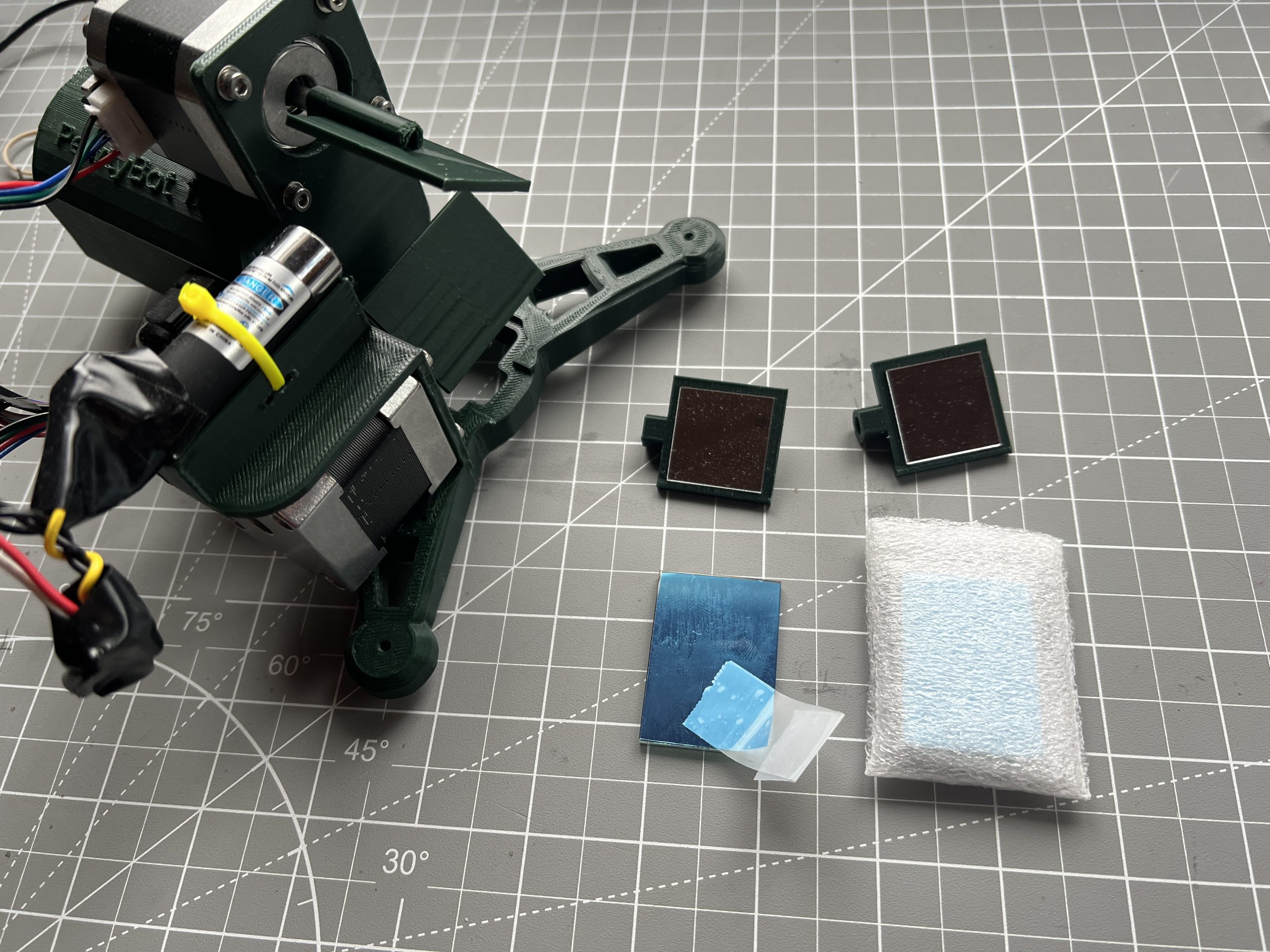
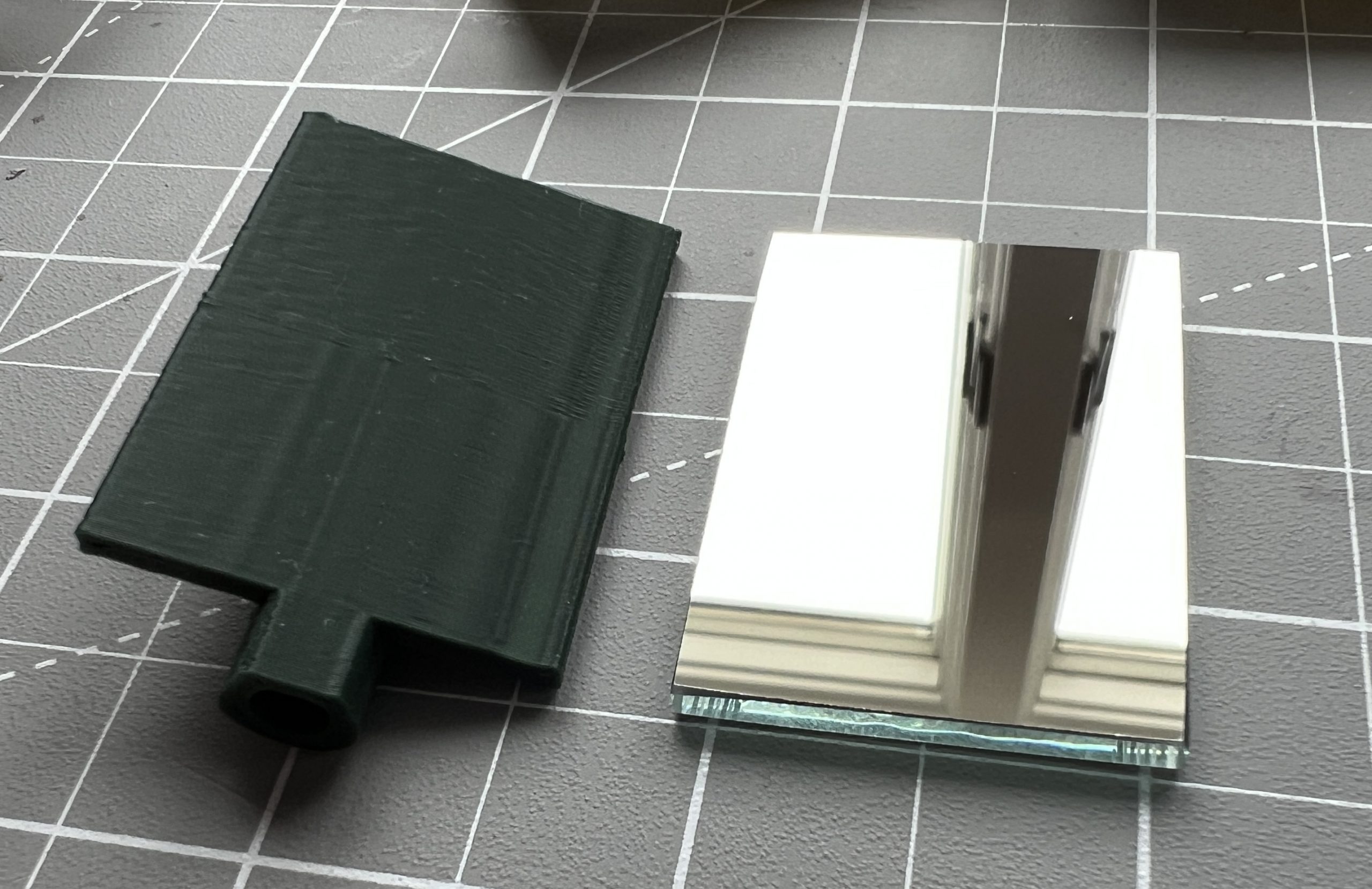
These new fancy mirrors are extremely crisp. Unfortunately, one of them slid on the epoxy as it cured, this won’t impact use but I’m bummed for I really did all I could to get everything perfect.
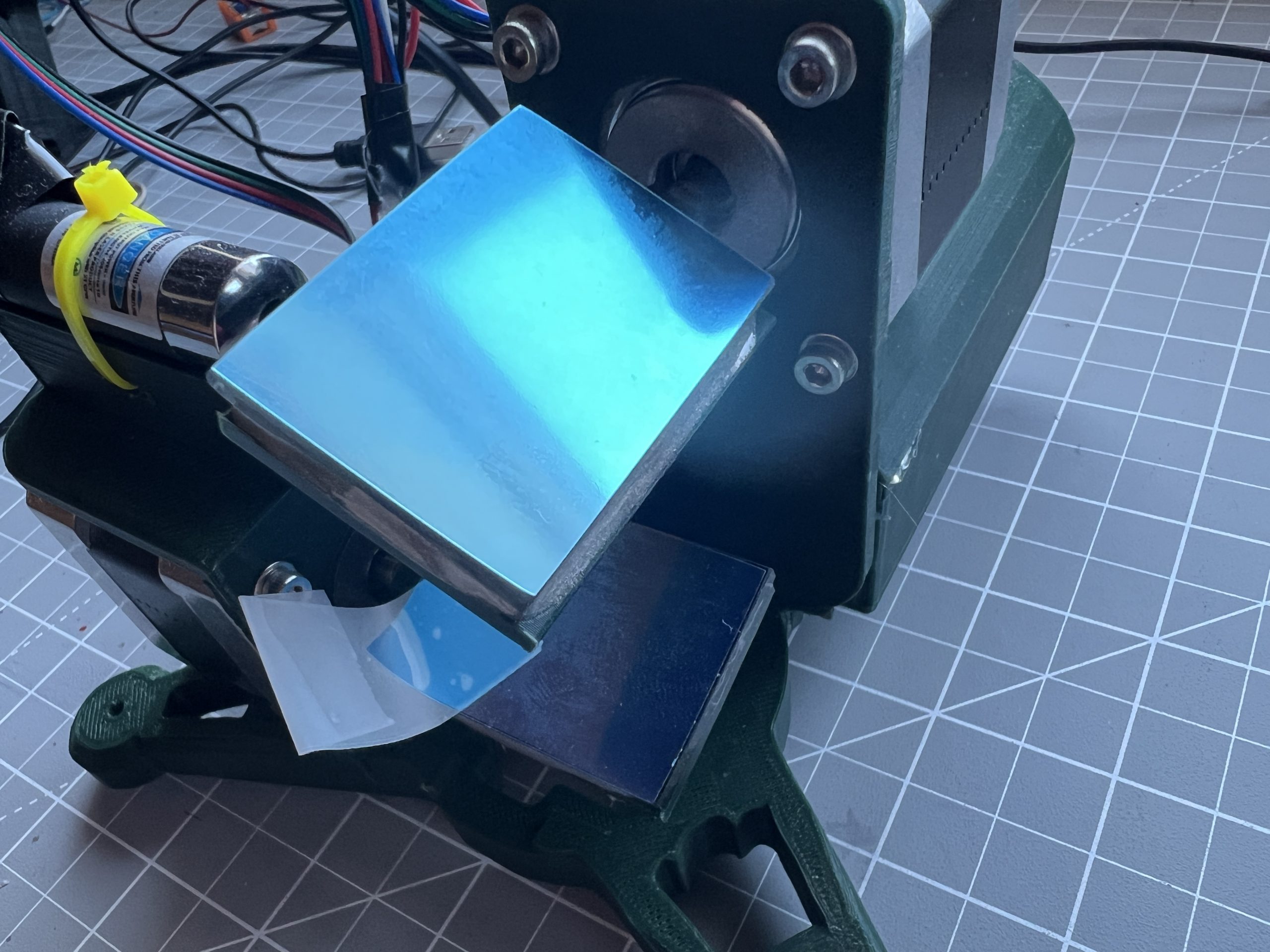
I tested the upgraded machine and it performed just as well as before, but the laser pointer was pristine as it hit the medium. This might not be a $70 improvement, but if I’m going to build a machine it’s hard to leave it lacking. The kids have been curious about this new development, it’s always fun to see the gears turn when they engage.
He watched the Olympics and created all sorts of jumps and grinds.

The wood piles are reaching their ends so it’s time to supplement them with dead (dry) stuff from the forest. We’ve gone through a lot of wood this Winter.