Quick points about this motor & driver
They are wonderfully cheap and extremely accurate due to 1/64 gearing. They move by 0.087890625° per step! However, the gearing is made of plastic and will wear out overtime, especially if moving heavy objects. Lastly the motors can become a little toasty if you work them hard.
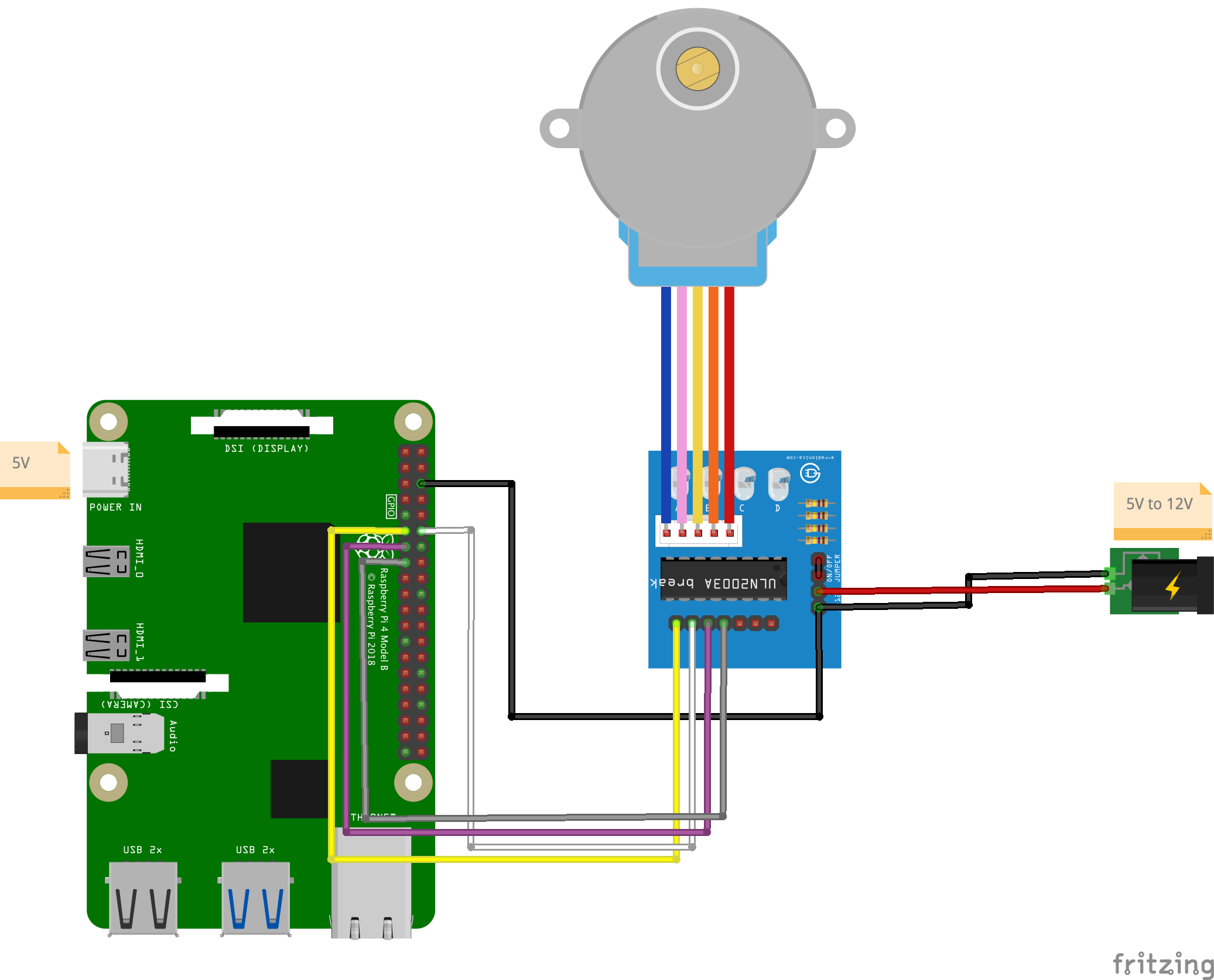
Circuit
Fritzing
Code
#!/usr/bin/python3
import RPi.GPIO as GPIO
import time
in1 = 17
in2 = 18
in3 = 27
in4 = 22
# careful lowering this, at some point you run into the mechanical limitation of how quick your motor can move
step_sleep = 0.002
step_count = 4096 # 5.625*(1/64) per step, 4096 steps is 360°
direction = False # True for clockwise, False for counter-clockwise
# defining stepper motor sequence (found in documentation http://www.4tronix.co.uk/arduino/Stepper-Motors.php)
step_sequence = [[1,0,0,1],
[1,0,0,0],
[1,1,0,0],
[0,1,0,0],
[0,1,1,0],
[0,0,1,0],
[0,0,1,1],
[0,0,0,1]]
# setting up
GPIO.setmode( GPIO.BCM )
GPIO.setup( in1, GPIO.OUT )
GPIO.setup( in2, GPIO.OUT )
GPIO.setup( in3, GPIO.OUT )
GPIO.setup( in4, GPIO.OUT )
# initializing
GPIO.output( in1, GPIO.LOW )
GPIO.output( in2, GPIO.LOW )
GPIO.output( in3, GPIO.LOW )
GPIO.output( in4, GPIO.LOW )
motor_pins = [in1,in2,in3,in4]
motor_step_counter = 0 ;
def cleanup():
GPIO.output( in1, GPIO.LOW )
GPIO.output( in2, GPIO.LOW )
GPIO.output( in3, GPIO.LOW )
GPIO.output( in4, GPIO.LOW )
GPIO.cleanup()
# the meat
try:
i = 0
for i in range(step_count):
for pin in range(0, len(motor_pins)):
GPIO.output( motor_pins[pin], step_sequence[motor_step_counter][pin] )
if direction==True:
motor_step_counter = (motor_step_counter - 1) % 8
elif direction==False:
motor_step_counter = (motor_step_counter + 1) % 8
else: # defensive programming
print( "uh oh... direction should *always* be either True or False" )
cleanup()
exit( 1 )
time.sleep( step_sleep )
except KeyboardInterrupt:
cleanup()
exit( 1 )
cleanup()
exit( 0 )
Stuff you might need for this to run:
sudo apt-get update --fix-missing && sudo apt-get install python3-rpi.gpio
Results
This motor takes 5.625*(1/64)° per step, this means 2048 steps for 180°:
and 4096 steps for 360°:
One thing that is super cool about the driver board are the LEDs. Projects are always cooler with blinky LEDs, but these guys also help show what is actually going on inside the stepper, and can help you find issues. They are supposed to light up in sequence.