also got EMP’d. That’s kind of crazy to think about. I suppose this isn’t the most reliable electronics but it kind of gets you thinking about what else could be affected. Or what we could lose with a closer strike.

also got EMP’d. That’s kind of crazy to think about. I suppose this isn’t the most reliable electronics but it kind of gets you thinking about what else could be affected. Or what we could lose with a closer strike.
I lost a voltage sensor the exact minute thunder struck very close to the house, Nicole happened to be filming because it was an impressive mix of rain, hail & thunder. Does thunder create some sort of EMP? Could be a coincidence but the timing is really suspicious. Sorry I mean sus.
dead sensor :\

Oh, well I’ll just buy a replacement.

And fuck, I forgot we screw over allies and suck up to dictators now. Phidgets come from Canada, I never found any comparable alternatives in the realm of current sensing that goes beyond small hobbyist projects. And I don’t really want to relearn/recode a whole new deal anyway. I just want replacement parts.
Extensive searching pointed to robotshop.com having Phidgets parts in stock. So I grabbed spares for everything to get a few thunderstrikes ahead and buy me a few years. For the top 3 parts, I grabbed everything they are left.

The battery voltage sensor is actually important these days as automation uses it to make decisions on which circuits to turn on/off. So for a few days until I got the part, I moved the panels’ voltage sensor to the battery. Sensing the panels is informational and has no real consequence on function. With anything solar, I have appreciated having spares at hand so it was time to spend some money and make that true for the monitoring side of things which we became more dependent on over time.
I can make them pretty fast now, I bought top notch stepper drivers and servos for it. It’s so much quieter than the previous one. I’m learning that it makes no sense to buy cheap hardware when you’re not doing volume. The few bucks saved will be paid for many times over in wasted time. I took pictures for documentation but I’m not sure if I’ll have the time to sink into it.

A lot of refinements went into this one, from the thousands of hours that the previous model was in use.
This was the very first model, built long before I got into tabletop plotters:
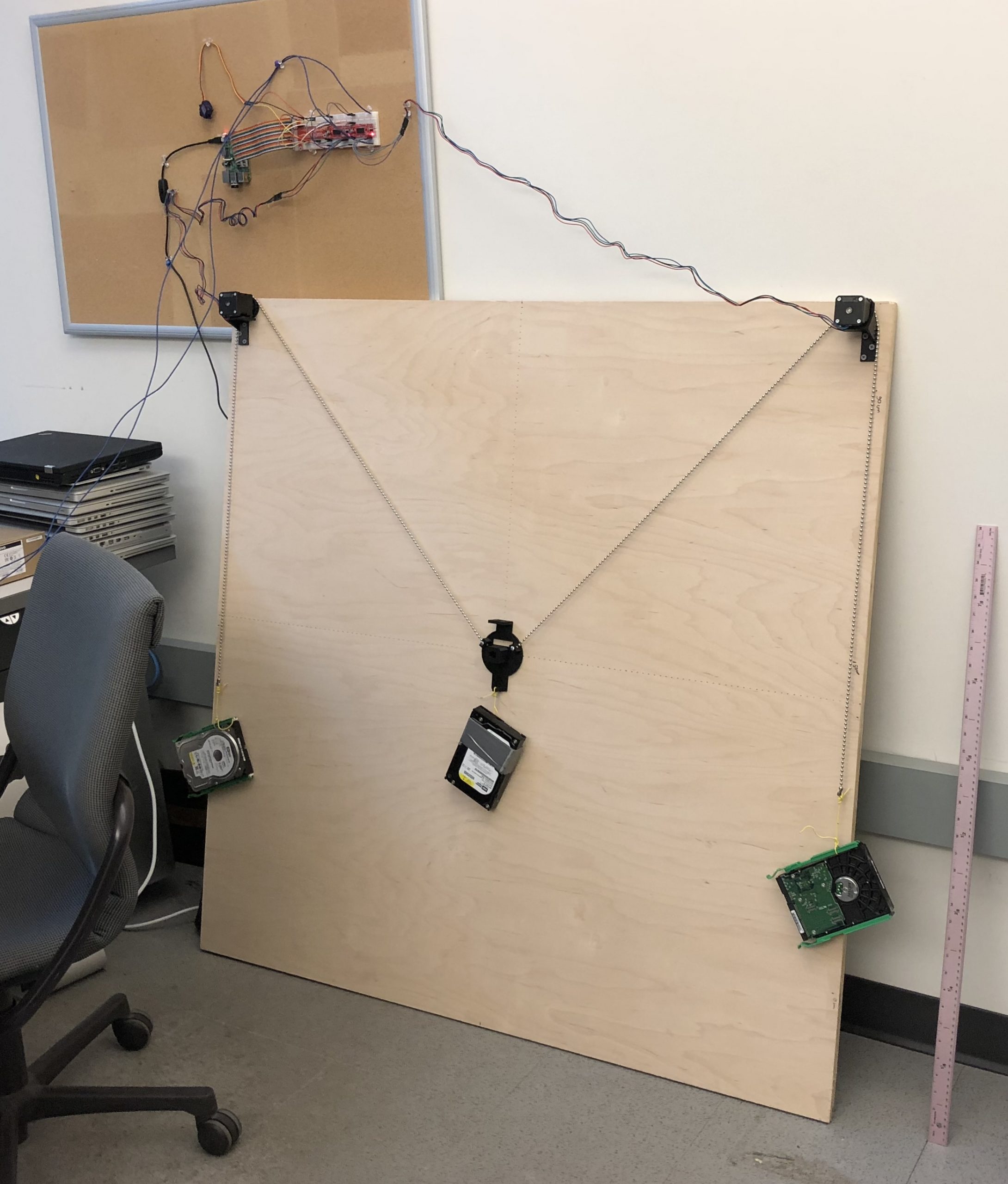
It’s pretty pathetic to look at 🙂 but it was a good stepping stone. I built another other one for teaching based on cheap 28BYJ-48 steppers. All this to say Gondola PlottyBot v2 is very much the result of a journey.